「マイクロロボットその場組み立て法」を確立 動力も人工筋肉で確保、量産化に道
体内に薬効成分を直接送り込んだり、生体検査を行える「マイクロロボット」技術の確立が期待されているが、日本の研究グループがその可能性を広げる研究成果を発表した。マイクロ流路の中で光に応答する材料を流しながら、マイクロロボットのボディと駆動源となるアクチュエータを連続的に生産・組み立てを行える「マイクロロボットその場組み立て法」を開発したという。研究成果を発表した論文は関連学術誌に掲載され、表紙にも取り上げられた。
研究成果を発表したのは、大阪大学 大学院工学研究科の森島圭祐教授、王穎哲特任研究員(常勤)、 北陸先端科学技術大学院大学 先端科学技術研究科 バイオ機能医工学研究領域の平塚祐一准教授、岐阜大学 工学部の新田高洋教授らの共同研究グループ。マイクロロボット、特に柔軟な構造を持つロボットは、生物医学などの分野で非常に幅広い応用の可能性があるものの、小さなロボットにアクチュエータなど様々な機械部品を組み込むことは現状まだ困難となっている。従来の方法では、マイクロロボットの部品を異なる場所で製造し、その後組み上げていく手法がとられており、迅速に生産できる状況とはいえない。
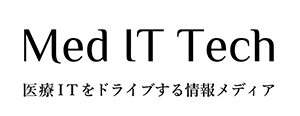
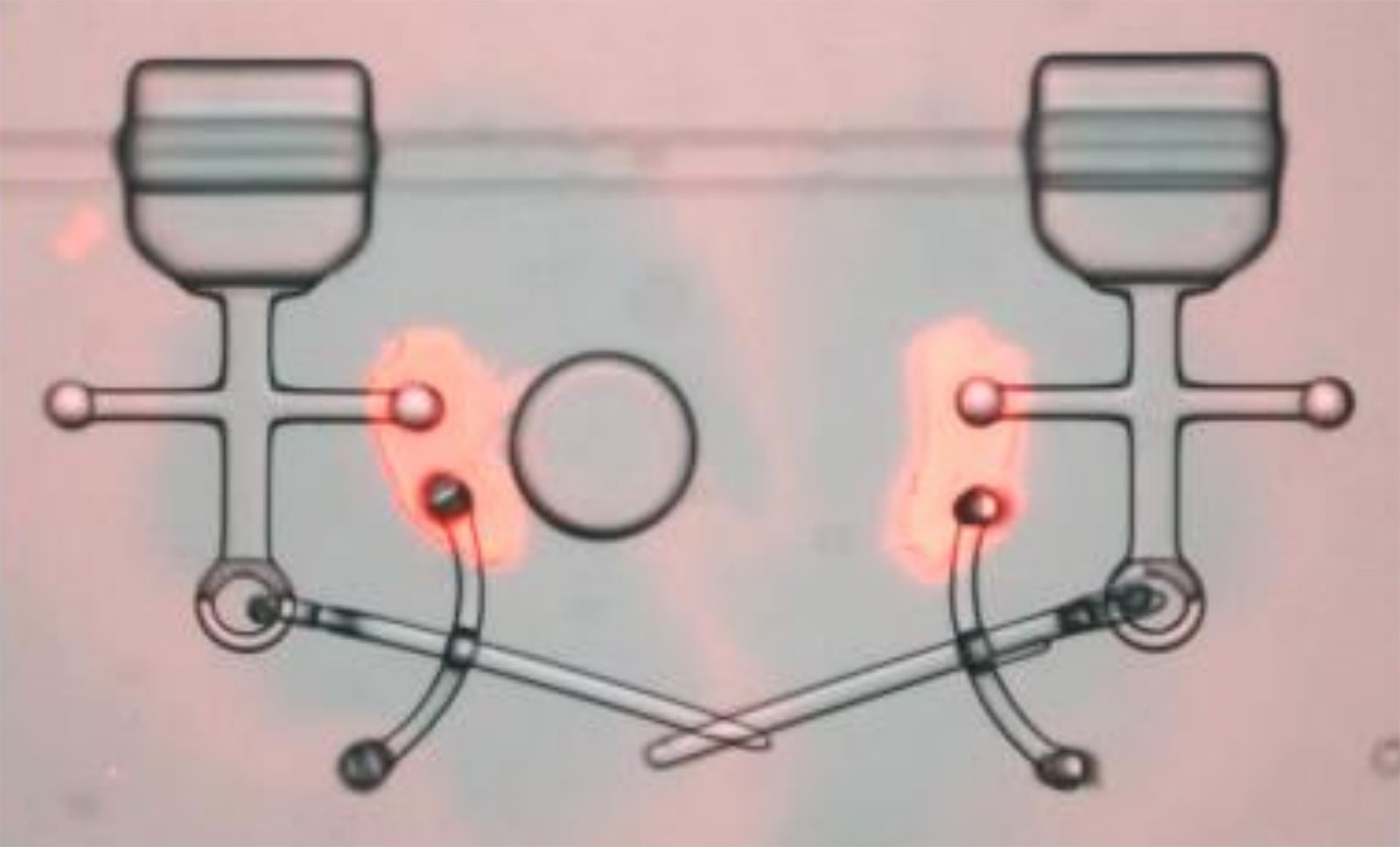
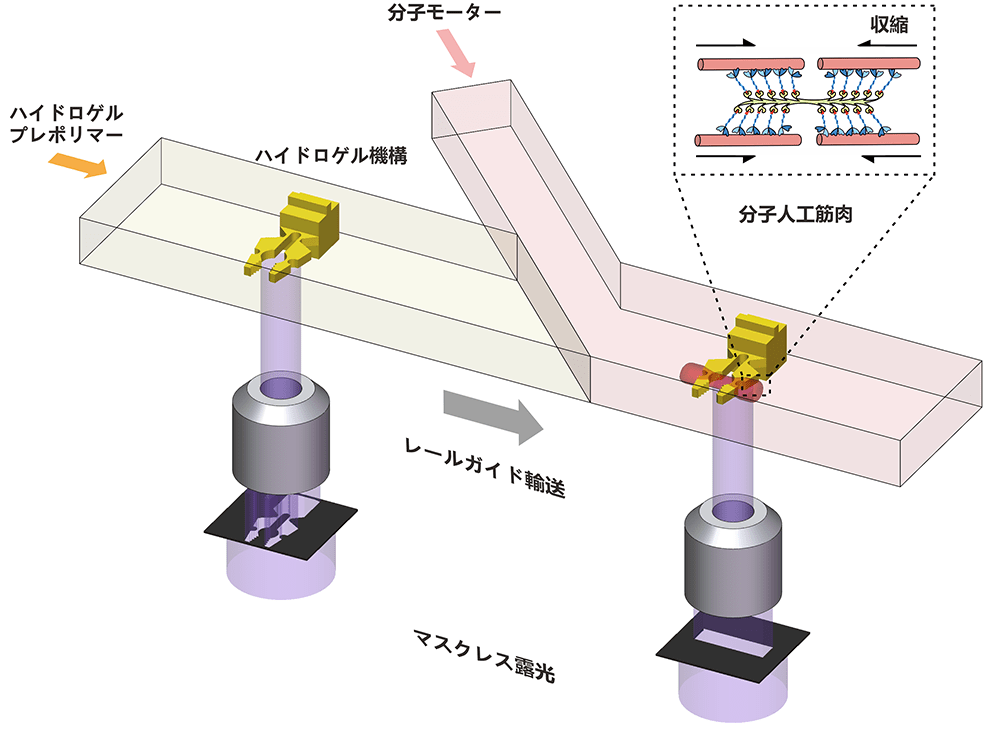
研究グループでは自然界の生体内システムの自己組織化プロセスに着想を得て、マイクロ流路内で、マスクレスリソグラフィー※1により、ハイドロゲル材料の機械的構造をプリントする製法を開発した。 この「その場組み立て」により、マイクロロボットを迅速に次々と生産することができるという。さらに、マイクロロボットの動力問題を解決するため、この生産プロセスのなかで、生体分子モーターからなる人工筋肉をハイドロゲル機構の狙った位置に直接プリントすることで機構を駆動できるようにした。この手法で生産することにより、アクチュエータを迅速に動的再構成し、複雑な仕事を行うマイクロロボットを実現できるととしている。
研究グループでは、今後のオンチッププリンティング技術の向上や人工筋肉の性能向上により、現在の細胞ハイブリッドロボットのボトルネックを打破し、実用化に向けた一歩を踏み出すことが期待される手法であるとしている。研究成果は論文として専門誌「Science Robotics」に掲載され、表紙にも取り上げられている。