BMIでロボットに20もの日常動作の指令に成功、スタンフォード大
脳信号を解析し、ロボットや外部機器を操作できるようにするBMI(Brain Machine Interface) の研究は、四肢に障害を持つ人の行動をサポートすることを主目的に世界の研究機関で多く取り組まれているが、スタンフォード大学の研究チームがこのほど、先行研究より精度高く脳波を解析し、ロボットを使って20もの日常的動作を実行させることに成功したと報告した。これまでより動作につながるまでの時間が短縮されているという。
複数のアルゴリズムを組み合わせ「何」を「どうするか」を解析

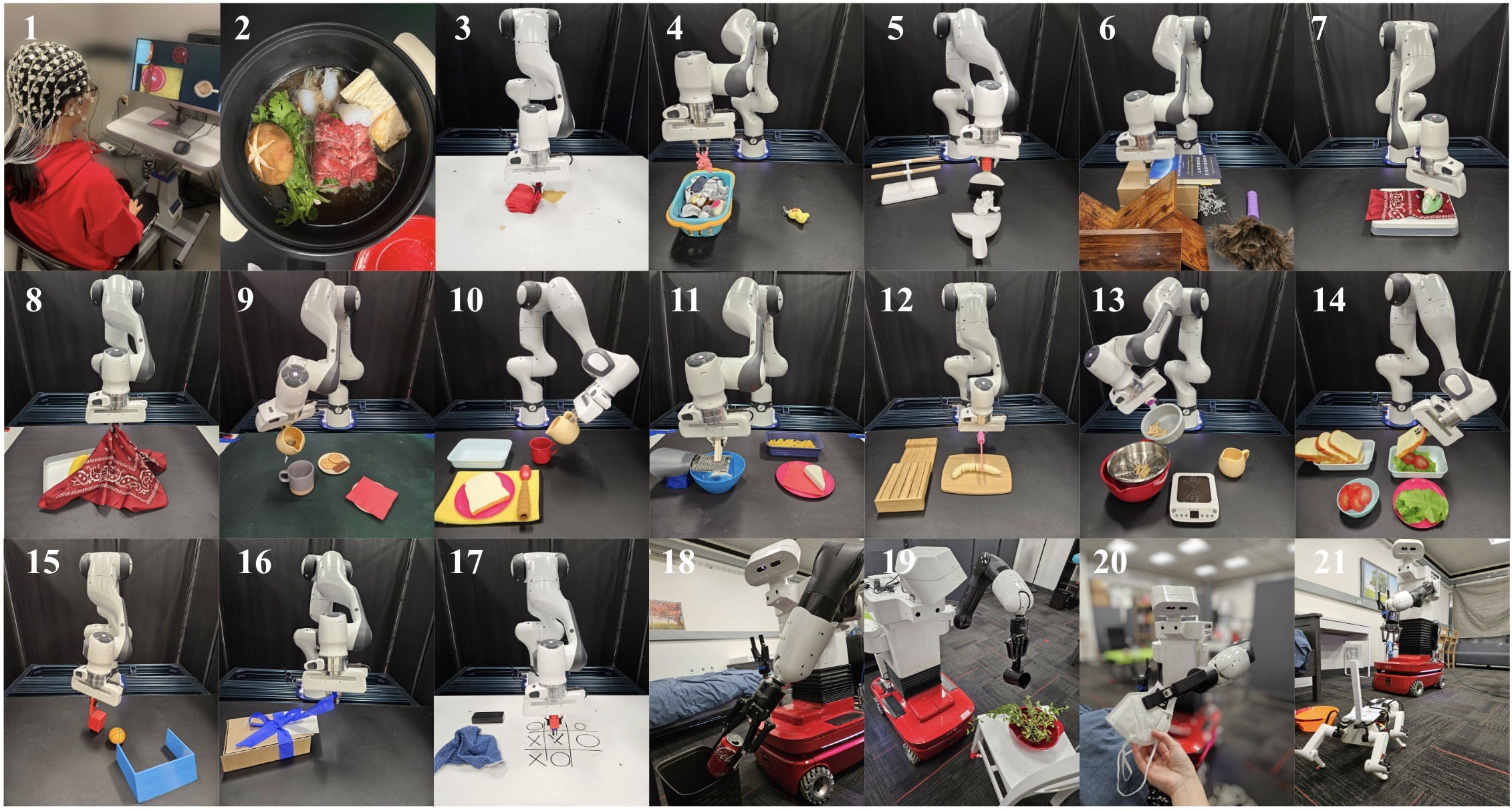
研究チームが「NOIR」と名付けたシステムは、AIを活用して脳波を解析するシステムと、単純な動作パターンを予めプログラミングされたロボットアームの2つから構成されている。フローとしては、「何」を「どうしたいか」をそれぞれ解析し、ロボットアームに登録された行動パターンのどれを適用するかを特定して伝え、指令を受けたロボットアームが実際に動くという流れだ。
まず「何」を動かしたいのかを特定するために、被験者のSSVEP(定常状態視覚誘発電位)※1を測定し、この信号をCCA※2というアルゴリズムで特徴量を大きくして判別できるようにして、特定する。次に運動イメージ(MI)※3 を想起してもらい測定、これをCSP※4とQDA※5という複数の機械学習アルゴリズムで解析、どの動作でどこまで動かすのかを特定する。その後、特定したものを命令セットとしてロボットアームに伝送する。ロボットアームにはあらかじめ14パターンのアクションがプログラミングされており、命令セットに基づいてそれらを組み合わせ、被験者が想起した動作を行う。
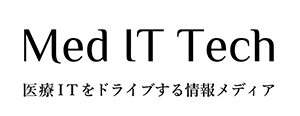
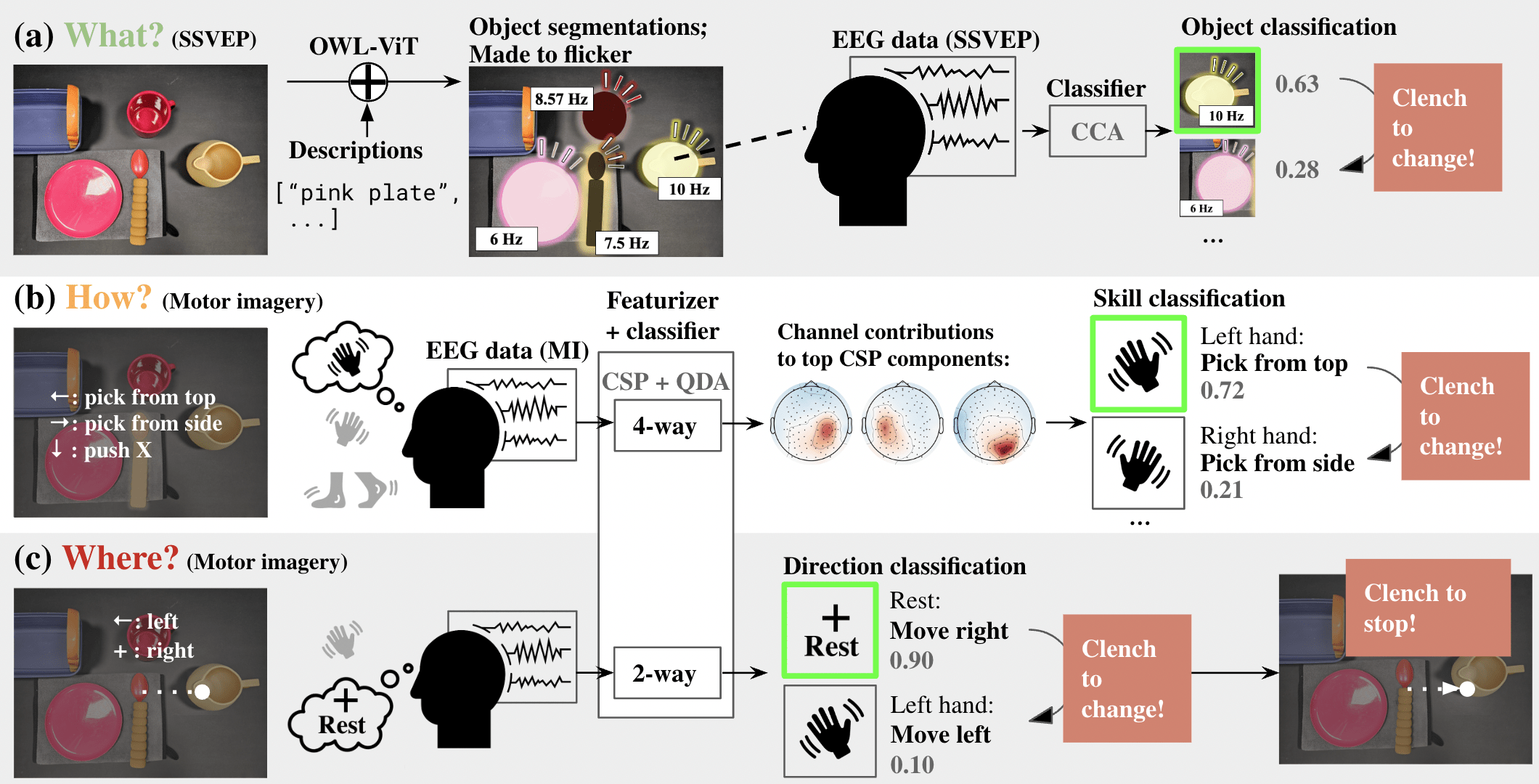
研究チームは「NOIR」の精度を検証するため、3名の被験者にさまざまな動作を想起してもらったところ、ロボットアームが食事の準備、掃除など20もの日常動作を想起した通りに行ったことを確認した。各動作の成功には平均して1.8回必要で、各動作が完了するのにかかった時間は約20.3分だった。研究チームによれば、開発した解析システムで従来より解析時間が60%短縮されたという。
※1 SSVEP(定常状態視覚誘発電位)
特定の時間周波数で明暗変化する視覚刺激を見るときに、それに対応した周波数を脳波から抽出する測定手法。 目に光を当てて脳波の定常状態を作り出し、そこから思い浮かべたことでラベル付け、分類する。注意を向けるとその振幅が増加することを利用することで、脳波から注意の変動を測定できる。
※2 CCA
CCAは,多チャンネル信号からなる2つのデータセットの間の相関を測る解析手法。各データセットの信号の重み付き線 形和からなる正準変量に対して,それらの間の相関係数を最大化するような重みベクトルを求める。フー リエ変換より精度の高い識別を行うとされる。
※3 MI (Motor Imagery)
運動イメージ、人が自分の体を動かしたり、物を動かしたいと想起するイメージそのものを指す。脳波から直接機械、ロボットを動作させようとするインターフェイス(Brain Machine Interface,BMIの研究開発では、被験者に1秒以上MIをイメージしてもらい、その際の脳波を計測することが多い。
※4 Common Spatial Patterns
マルチチャネル データのそれぞれのチャネルの特徴量を誇張することで、抽出しやすくする分類メソッド。
※5 QDA(二次判別分析)
QDAはQuadratic Discriminant Analysisの略で、日本語では二次判別分析と呼ばれる。古典的な機械学習の手法の1つで、LDAから派生したもの。LDAと同様にデータは二乗距離が最小のクラスに分類されるが、LDAとは異なり群団間で分散が異なる場合にも対応することができる。
論文リンク:NOIR: Neural Signal Operated Intelligent Robots for Everyday Activities