内視鏡の動きに追尾し術野を3D映像でナビゲーション、九州大学が開発 手術結果を有意に改善
九州大学は、病院泌尿器科と先端医工学診療部が共同で、ロボット手術において腎実質温存に貢献する自動追尾型ナビゲーションシステムを開発していたと発表した。2016年に導入しており、効果検証を行った論文がアメリカの泌尿器科学雑誌に掲載された。
手術ロボットでの腎部分切除術に活用 臨床上の有効性報告は世界初
システムを開発したのは、九州大学病院泌尿器科の小林 聡臨床助教と同病院先端医工学診療部。光学式センサーを使用して手術支援ロボットの内視鏡の動きに沿って3D画像が動くように設計され、術者は、このナビゲーション画像を手術支援ロボットのコンソール内で常に確認できる。視線を術野から逸らすことなく、3D画像が持つ解剖情報をリアルタイムに確認できる点が特徴だ。これにより術者は脂肪組織や他の臓器に覆われ、表面上は見えにくい腎血管や腎腫瘍についての位置や構造を3D画像を介して認識でき、結果、腫瘍の立体構造を理解しながら腎部分切除を行うことが可能となった。同病院では2016年から臨床導入しているという。
小林助教らはこのシステムの有効性を確認するため、これまでシステムを活用して実施した症例とそれ以外の術例を比較検証する後ろ向きの臨床研究を行った。2013年6月から2018年12月までの、44例(システム非活用)および102例(システム活用)をマッチングし、42例どうしの1:1での検証を行ったところ、システムを活用した術例のほうが、腎実質の温存量において有意に改善が見られたという。
九州大学では、ロボット手術かつ泌尿器科領域において、こうしたシステムが臨床上の有効性が報告された事例は世界初だとし、腎実質の温存は、術後腎機能に最も影響をもたらす因子の一つであり、このシステムが患者へのロボット手術において安全性を高める新たな医療技術になる可能性も示したとしている。
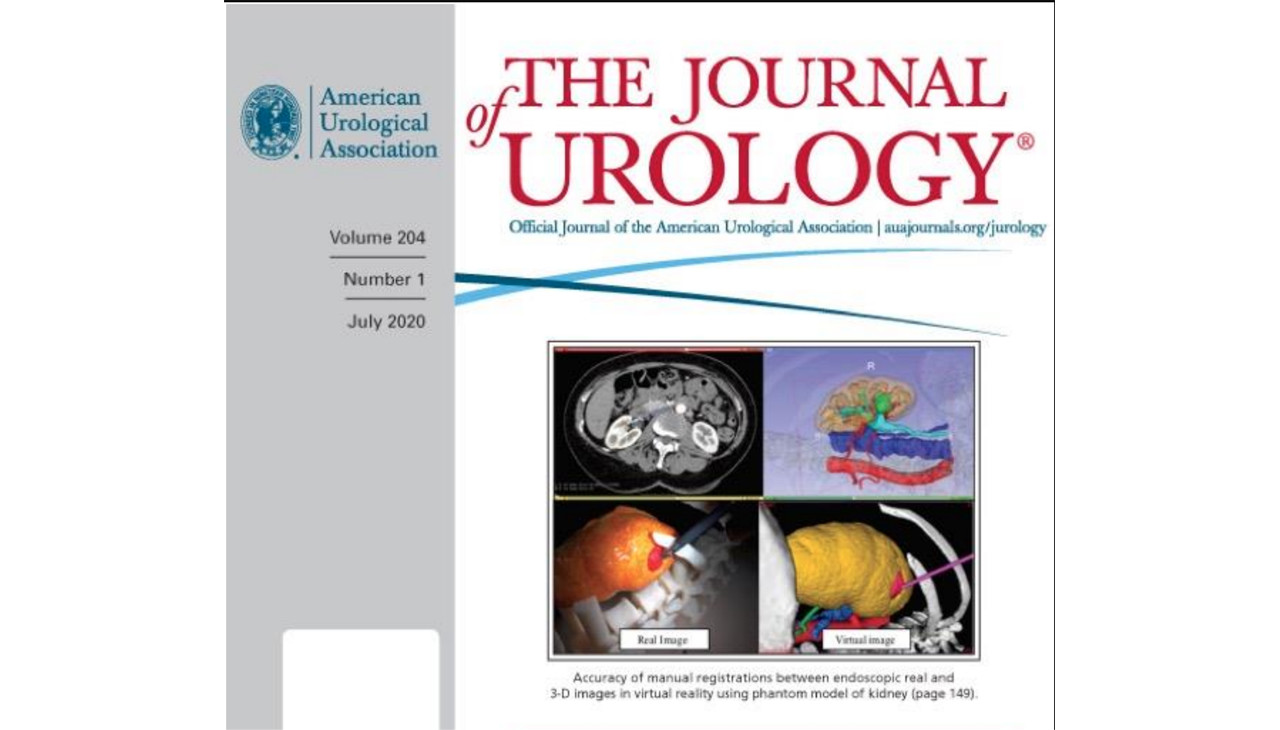
なおこの研究結果は、アメリカの泌尿器科学雑誌『The Journal of Urology』2020年7月号に掲載され、論文内のナビゲーションシステムに関するイラストが表紙を飾った。